وضوح توانایی یک سیستم تصویربرداری برای بازتولید جزئیات شی است. می تواند تحت تأثیر عواملی مانند نوع نور مورد استفاده، اندازه پیکسل سنسور و قابلیت های اپتیک باشد. هر چه جزئیات شی کوچکتر باشد، وضوح مورد نیاز بالاتر است.
تقسیم تعداد پیکسلهای افقی یا عمودی روی یک حسگر به اندازه جسمی که میخواهید مشاهده کنید، نشان میدهد که هر پیکسل چقدر فضای روی جسم را میپوشاند و میتوان از آن برای تخمین وضوح استفاده کرد. با این حال، این واقعاً تعیین نمی کند که آیا اطلاعات روی پیکسل از اطلاعات روی هر پیکسل دیگر قابل تشخیص است یا خیر.
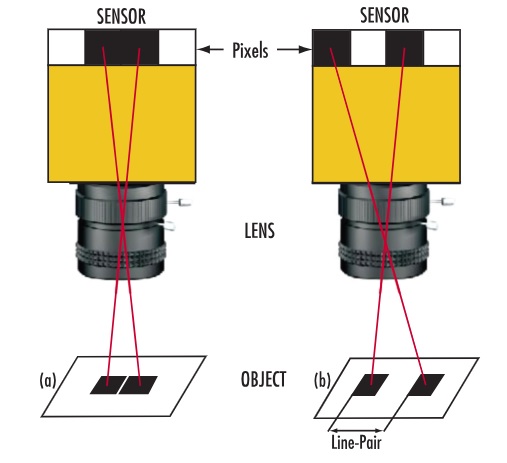
مهم است که بفهمیم چه چیزی می تواند وضوح سیستم را محدود کند. شکل 1 یک جفت مربع را در زمینه سفید نشان می دهد. اگر مربع ها روی پیکسل های همسایه روی سنسور دوربین تصویر شوند، به جای دو مربع مجزا (b) یک مستطیل بزرگتر (a) به نظر می رسند. برای تشخیص مربع ها، حداقل باید یک پیکسل بین آنها باشد. این حداقل فاصله، وضوح محدود کننده سیستم است. محدودیت مطلق با اندازه پیکسل های روی سنسور و تعداد پیکسل های روی سنسور تعریف می شود.
شکل 1: حل دو مربع. اگر فضای بین مربع ها خیلی کوچک باشد (الف) حسگر دوربین نمی تواند آنها را به عنوان اشیاء جداگانه تشخیص دهد.
جفت خط و محدودیت سنسور
وضوح اغلب به عنوان یک بعد گزارش می شود. این مفهوم از وضوح حداقل اندازه ای است که توسط یک لنز یا سیستم قابل حل است، توصیف کاملی از وضوح نیست. وضوح بیشتر به عنوان فرکانس توصیف می شود که در جفت خط در میلی متر اندازه گیری می شود [lpmm]
“>[lp/mm] جفت خط یک جفت مربع سیاه و سفید در فضای جسم است. وضوح لنز متاسفانه مطلق نیست. در یک وضوح مشخص، توانایی دیدن دو مربع به عنوان موجودیت های جداگانه به سطح خاکستری بستگی دارد. اگر تفاوت در مقیاس های خاکستری مربع ها و فضای بین آنها بیشتر باشد، یک سیستم می تواند به راحتی یک جفت خط را حل کند (شکل 1b). این تفاوت در مقیاس خاکستری به عنوان کنتراست شناخته می شود. بنابراین رزولوشن به عنوان یک فرکانس فضایی تعریف میشود که در آن آورده شده است [lpmm]
“>[lp/mm]، که در آن کنتراست خاصی به دست می آید.
کنتراست طبق قرارداد برای تولیدکنندگان مختلف لنز و دوربین تنظیم شده است، اما معمولاً برای لنزها 20٪ تعیین می شود. به همین دلیل، محاسبه رزولوشن بر حسب [lp/mm]
“>[lp/mm]هنگام مقایسه لنزها و برای تعیین بهترین انتخاب برای سنسورها و برنامه های کاربردی بسیار مفید است.
سنسور جایی است که محاسبه وضوح سیستم آغاز می شود. با شروع با سنسور، تعیین عملکرد لنز مورد نیاز برای مطابقت با سنسور یا سایر نیازهای کاربردی آسان تر است. بالاترین فرکانس قابل حل توسط یک سنسور، فرکانس Nyquist، در واقع دو پیکسل یا یک جفت خط است. (2 pixels=1 cycle=1 line pair, or lp). جدول 1 محدودیت Nyquist مرتبط با اندازه پیکسل موجود در برخی از حسگرهای رایج را نشان می دهد. وضوح سنسور (ξSensor)، به عنوان وضوح فضای تصویر سیستم شناخته می شود(ξImage Space)، با ضرب اندازه پیکسل (ها) معمولاً در واحد میکرون در 2 (برای ایجاد یک جفت) و تقسیم آن به 1000 برای تبدیل به میلی متر محاسبه می شود:
ξSensor=ξImage Space=(1 lp/2×s)×(1000μm/1mm)
حسگرهایی با پیکسل های بزرگتر وضوح محدودتری خواهند داشت. حسگرهایی با پیکسلهای کوچکتر وضوح محدودتری خواهند داشت. نحوه استفاده از این اطلاعات برای تعیین عملکرد ضروری لنز را می توان در عملکرد سنسور و محدودیت ها یافت. رزولوشن محدود کننده روی جسم مورد مشاهده را می توان با استفاده از روابط بین اندازه سنسور، میدان دید (FOV) و تعداد پیکسل های روی سنسور محاسبه کرد.
اندازه سنسور به اندازه ناحیه فعال سنسور دوربین اشاره دارد که با اندازه قالب سنسور مشخص شده است (اطلاعات بیشتر در مورد فرمت سنسور را می توانید در Sensors پیدا کنید). با این حال، نسبتهای دقیق حسگر بسته به نسبت ابعاد متفاوت خواهد بود، بنابراین فرمتهای حسگر اسمی باید فقط به عنوان یک راهنما استفاده شوند، بهویژه برای لنزهای دور مرکزی و اهداف با بزرگنمایی بالا. اندازه سنسور (H)؛ افقی، عمودی یا مورب؛ می توان مستقیماً از اندازه پیکسل و تعداد پیکسل های فعال روی سنسور (p) محاسبه کرد.
H=s×p×(1mm/1000μm)
| سایز پیکسل (µm) | (lpmm)
“> Nyquist محدودیت (lpmm) “>(lpmm)(lpmm) |
|---|---|
| 1.67 | 299.4 |
| 2.2 | 227.3 |
| 3.45 | 144.9 |
| 4.54 | 110.1 |
| 5.5 | 90.9 |
جدول 1: با افزایش اندازه پیکسل، محدودیت Nyquist مربوطه در [lp/mm] تناسب کاهش می یابد.
وضوح فضای شی
برای تعیین حداقل مطلق نقطه قابل تفکیک قابل مشاهده روی جسم، نسبت FOV به اندازه حسگر باید محاسبه شود. این به عنوان بزرگنمایی سیستم نیز شناخته می شود.
m=H/FOV
بزرگنمایی سیستم، وضوح فضای تصویر را تا وضوح فضای شی کاهش می دهد
ξObject Space=ξImage Space×m
هنگام توسعه یک برنامه کاربردی، وضوح فضای شی یک سیستم معمولاً بهعنوان بعد طول مشخص میشود نه در [lp/mm]. دو راه برای انجام این تبدیل وجود دارد:

در حالی که با استفاده از آخرین فرمول پرش به وضوح محدود کننده روی جسم آسان است، تعیین وضوح و بزرگنمایی فضای تصویربرداری برای ساده کردن انتخاب لنز بسیار مفید است. همچنین توجه به این نکته مهم است که عوامل اضافی زیادی دخیل هستند و این محدودیت اغلب بسیار کمتر از آن چیزی است که به راحتی می توان با استفاده از معادلات محاسبه کرد. درباره محدودیتهای کنتراست و انتخاب لنز در کنتراست و انواع لنزهای دید ماشینی بیشتر بدانید.
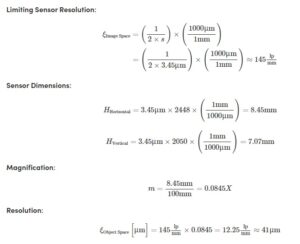
وضوح و بزرگنمایی مثال محاسبات با استفاده از سنسور ICX625 سونی
پارامترهای شناخته شده:
اندازه پیکسل: 3.45 × 3.45 میکرومتر
تعداد پیکسل: 2448 × 2050
FOV مورد نظر (افقی): 100 میلی متر
وضوح سنسور محدود کننده: